Arquitectura Técnica
Dos procesadores con responsabilidades deliberadamente separadas — porque la inferencia y la comunicación no pueden compartir el mismo cuello de botella.
El principio que gobierna cada decisión
Un sistema de protección eléctrica no puede depender de la nube ni tolerar latencias de red. El dispositivo se instala junto al tablero eléctrico del hogar y opera de forma completamente autónoma, incluso cuando el internet cae junto con la luz.
Arquitectura dual MCU + MPU
MCU · STM32U585 — Tiempo real puro
El microcontrolador se dedica exclusivamente a tareas de tiempo real:
- Muestreo ADC a 1 kHz (ZMPT101B) y ~2 Hz (ACS712, thread Zephyr con mutex)
- Inferencia de 3 modelos en paralelo
- Activación del relay físico < 1ms
- Sin red, sin logs, sin OS — latencia cero
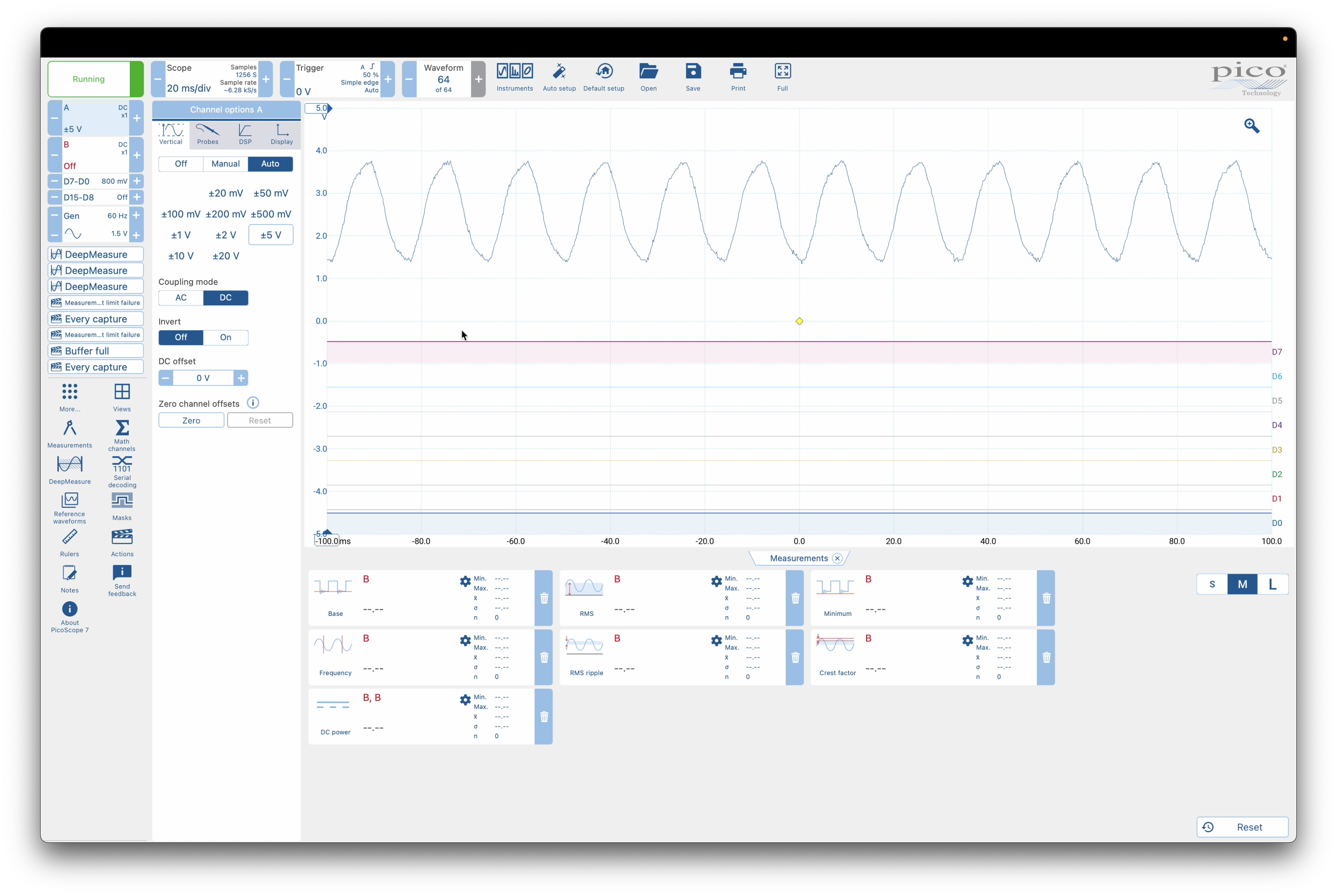
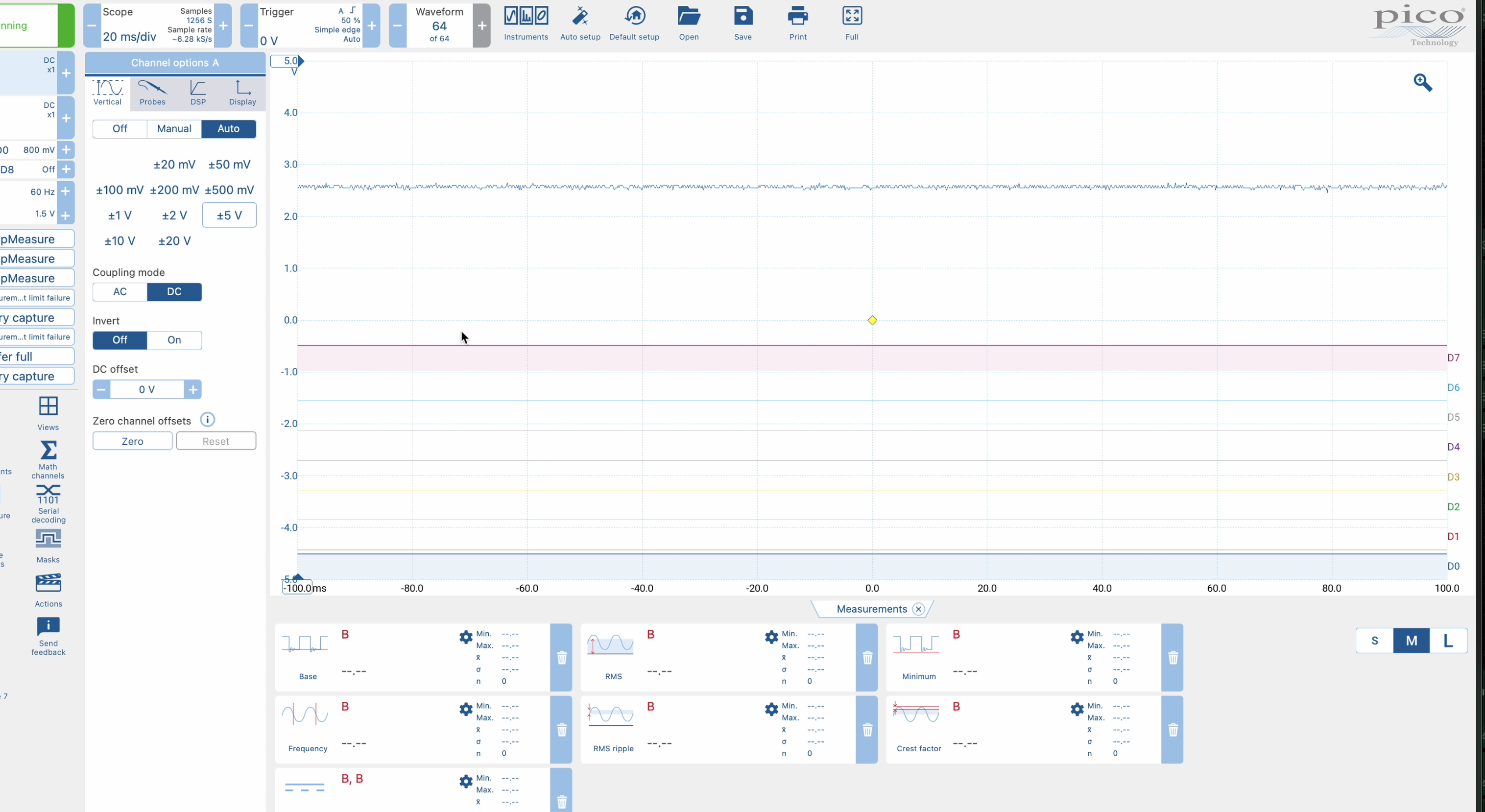
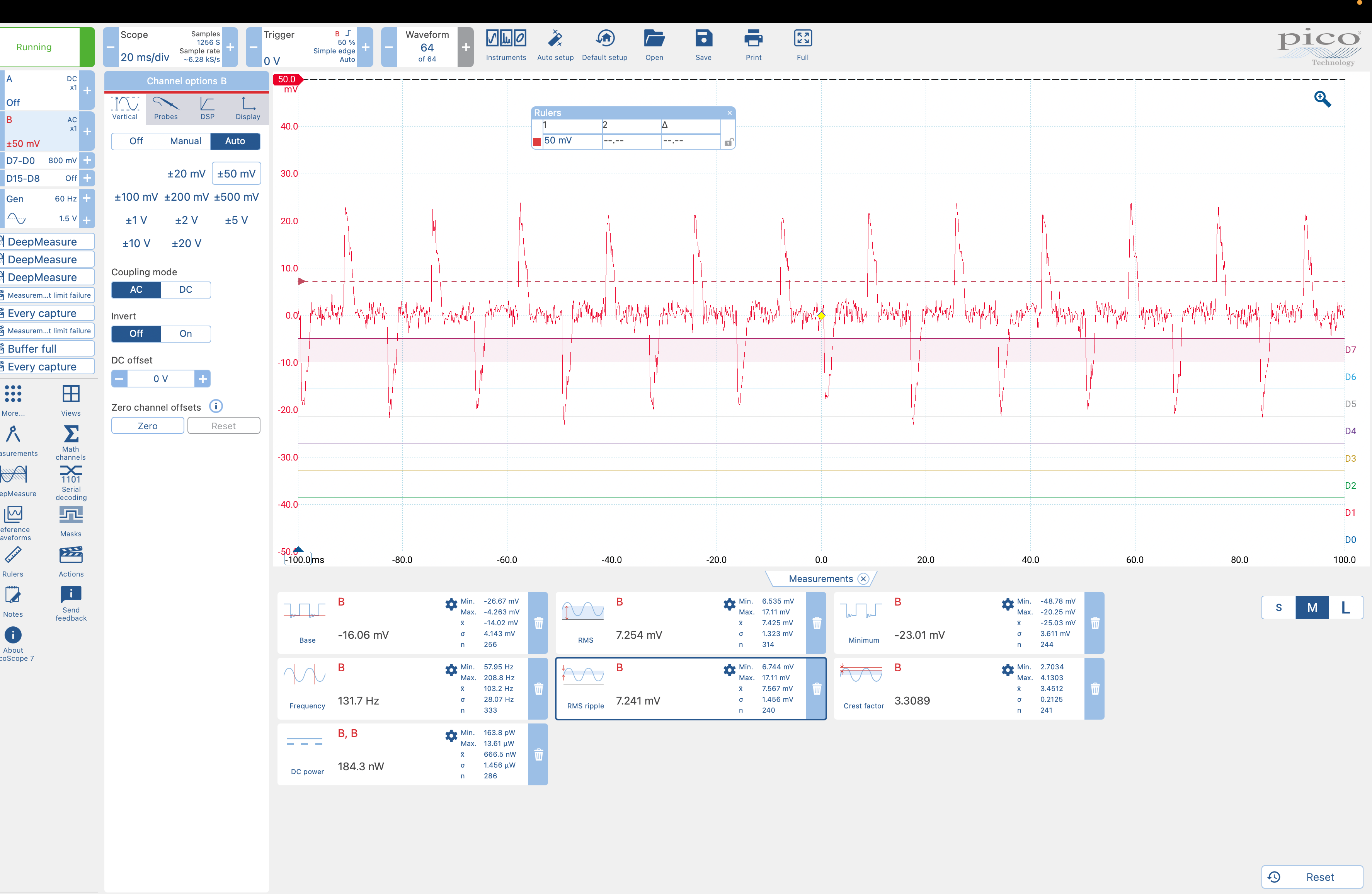
Señales que el MCU procesa en tiempo real
Señal normal de 60 Hz — el baseline que el modelo aprende a reconocer.
Señal de outage — RMS cae 164x. El modelo lo clasifica en la siguiente ventana de 200 ms.
Señal con ruido de red — el perfil de ruido que usamos para augmentation del dataset.
MPU · QRB2210 — Inteligencia de contexto
El microprocesador gestiona todo lo que requiere sistema operativo:
- Lógica de predicción compuesta: historial de las últimas 10 clasificaciones del MCU, evaluación de patrones antes de actuar
- Logger SQLite de eventos históricos
- Dashboard Flask + alertas Twilio WhatsApp
- OTA model updates vía Foundries.io
Esta separación garantiza que, pase lo que pase en la red, la respuesta física nunca se bloquee. Un crash en el MPU no afecta la capacidad del MCU de activar el relay.
Lógica de predicción compuesta
El relay no actúa en una sola detección — el MPU evalúa patrones:
history = deque(maxlen=10)
if history.count('sag_leve') >= 3: → alerta_amarilla (WhatsApp)
if history.count('sag_severo') >= 2: → alerta_roja → relay_off
Esto diferencia Tecovolt de un monitor pasivo: actúa predictivamente antes del colapso total.
Stack de software e IA
| Herramienta | Propósito |
|---|---|
| Edge Impulse Studio | Entrenamiento de los 3 modelos. Custom DSP blocks con THD vía Python/ngrok/Docker |
| Qualcomm AI Hub | Cuantización INT8. ~200 KB → ~50 KB por modelo |
| Arduino App Lab + Foundries.io | Entorno oficial Uno Q. OTA updates en campo |
| Flask + SQLite | Dashboard histórico en el MPU |
| Twilio WhatsApp API | Alertas bidireccionales + comandos de relay |
Flujo de operación
┌─────────────────┐ ┌──────────────────┐ ┌─────────────────────┐
│ 1. Entrenamiento│ │ 2. Optimización │ │ 3. Desarrollo y │
│ Edge Impulse │───▶│ Qualcomm AI Hub │───▶│ Deploy │
│ Studio │ │ │ │ Arduino App Lab │
│ · 3 modelos │ │ · Cuantización │ │ · C/C++ en MCU │
│ · Custom DSP │ │ INT8 │ │ · Python en MPU │
│ · 99.3% acc. │ │ · Perfilado │ │ · Entorno Uno Q │
└─────────────────┘ └──────────────────┘ └──────────┬──────────┘
│
┌─────────────────┐ ┌──────────────────┐ ▼
│ 5. Notificación │ │ 4. Actualización │ ┌─────────────────────┐
│ Twilio WhatsApp │◀───│ Foundries.io OTA │◀───│ Nodo desplegado │
│ · Alertas │ │ · Remota │ │ Evento de riesgo ──▶│
│ · Comandos │ │ · Escalabilidad │ │ Comando usuario ◀──│
└─────────────────┘ └──────────────────┘ └─────────────────────┘
Comunicación MCU ↔ MPU
Vía UART serial / Arduino_RouterBridge.h con protocolo JSON ligero. El MCU usa Bridge.provide() para exponer funciones al MPU. El patrón de concurrencia usa mutex Zephyr para lectura continua de sensores sin bloquear el loop de inferencia:
K_MUTEX_DEFINE(current_mutex);
void current_thread_fn(void*, void*, void*) {
while(1) {
// samplea 1000 veces @ 10kHz, calcula RMS
k_mutex_lock(¤t_mutex, K_FOREVER);
currentRMS = amps;
k_mutex_unlock(¤t_mutex);
k_msleep(500);
}
}
Seguridad y robustez
| Especificación | Detalle |
|---|---|
| Grado IP55 | Caja sellada apta para instalación exterior |
| 127V aislados | Zona de alto voltaje físicamente separada mediante transformadores y optoacopladores |
| Enclosure CAD | Diseñado con todos los componentes posicionados, listo para impresión 3D |